rotation 2-d
description
The rotation_2d and rotation_2d/with_viz tasks implement the
rotational flow field test of numerical order of convergence.
This test is similar to cosine_bell except the axis of rotation is a config
option and can be offset from the z-axis.
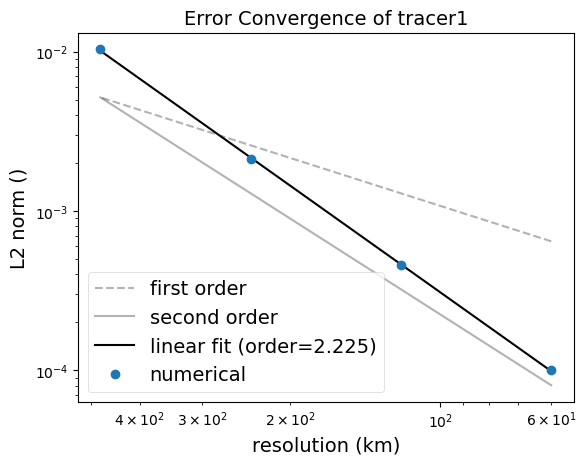
The numerical order of convergence is analyzed in the analysis step and
produces a figure similar to the following showing L2 error norm as a function
of horizontal resolution:
suppported models
These tasks support MPAS-Ocean and Omega.
mesh
Two global mesh variants are tested, quasi-uniform (QU) and icosohydral. Thus, there are 4 variants of the task:
ocean/spherical/icos/rotation_2d
ocean/spherical/icos/rotation_2d/with_viz
ocean/spherical/qu/rotation_2d
ocean/spherical/qu/rotation_2d/with_viz
The default resolutions used in the task depends on the mesh type.
For the icos mesh type, the defaults are:
# config options for spherical convergence tests
[spherical_convergence]
# a list of icosahedral mesh resolutions (km) to test
icos_resolutions = 60, 120, 240, 480
for the qu mesh type, they are:
# config options for spherical convergence tests
[spherical_convergence]
# a list of quasi-uniform mesh resolutions (km) to test
qu_resolutions = 60, 90, 120, 150, 180, 210, 240
To alter the resolutions used in this task, you will need to create your own
config file (or add a spherical_convergence section to a config file if
you’re already using one). The resolutions are a comma-separated list of the
resolution of the mesh in km. If you specify a different list
before setting up rotation_2d, steps will be generated with the requested
resolutions. (If you alter icos_resolutions or qu_resolutions) in the
task’s config file in the work directory, nothing will happen.) For icos
meshes, make sure you use a resolution close to those listed in
Spherical Meshes. Each resolution will be rounded to the nearest
allowed icosahedral resolution.
The base_mesh steps are shared with other tasks so they are not housed in
the rotation_2d work directory. Instead, they are in work directories
like:
ocean/spherical/icos/base_mesh/60km
ocean/spherical/qu/base_mesh/60km
For convenience, there are symlinks inside of the rotation_2d and
rotation_2d/with_viz work directories, e.g.:
ocean/spherical/icos/rotation_2d/base_mesh/60km
ocean/spherical/qu/rotation_2d/base_mesh/60km
ocean/spherical/icos/rotation_2d/with_viz/base_mesh/60km
ocean/spherical/qu/rotation_2d/with_viz/base_mesh/60km
vertical grid
This task only exercises the shallow water dynamics. As such, a single
vertical level may be used. The bottom depth is constant and the
results should be insensitive to the choice of bottom_depth.
# Options related to the vertical grid
[vertical_grid]
# the type of vertical grid
grid_type = uniform
# Number of vertical levels
vert_levels = 3
# Depth of the bottom of the ocean
bottom_depth = 300.0
# The type of vertical coordinate (e.g. z-level, z-star)
coord_type = z-level
# Whether to use "partial" or "full", or "None" to not alter the topography
partial_cell_type = None
# The minimum fraction of a layer for partial cells
min_pc_fraction = 0.1
initial conditions
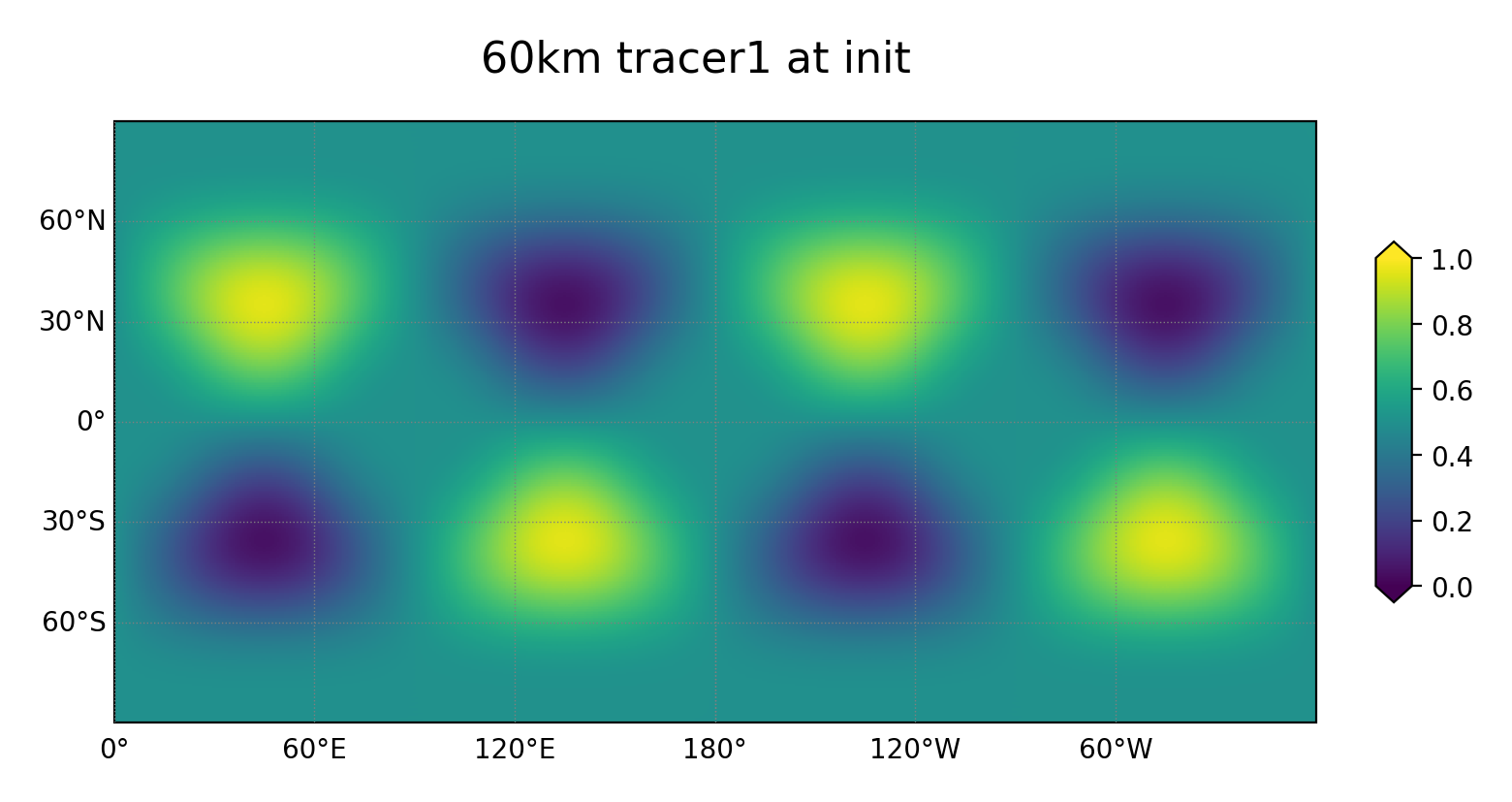
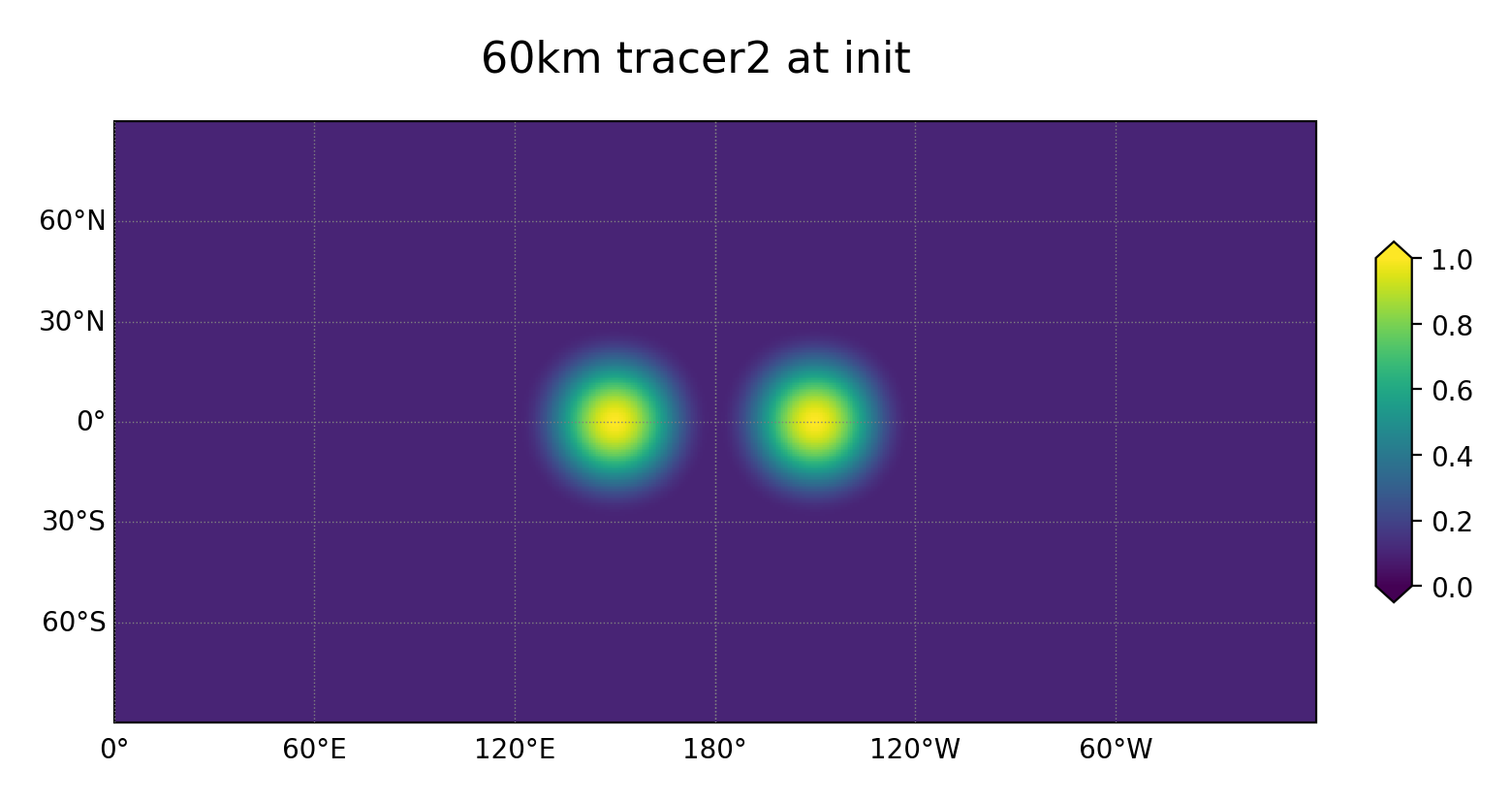
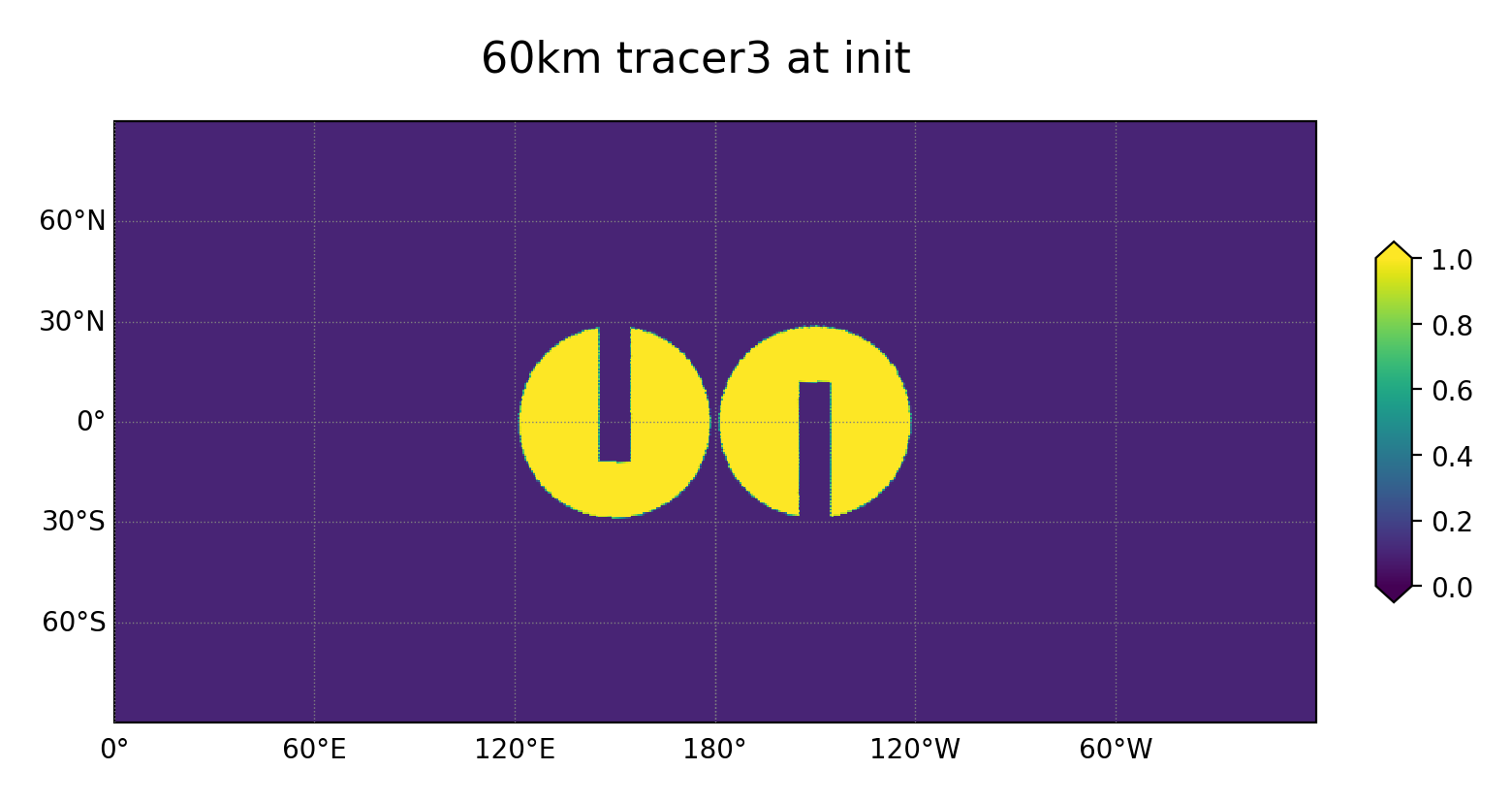
The initial condition is characterized by three separate tracer distributions
stored in three debugTracers:
tracer1: A c-infinity function used for convergence analysistracer2: A pair of c-2 cosine bellstracer3: A discontinuous pair of slotted cylinders
The velocity is that of rigid rotation about an axis offset from the z-axis of
the sphere. It is not given in Lauritzen et al. The axis of rotation is defined by a vector given by the cfg option rotation_vector.
Temperature and salinity are not evolved in this task and are given
constant values determined by config options temperature and salinity.
The Coriolis parameters fCell, fEdge, and fVertex do not need to be
specified for a global mesh and are initialized as zeros.
forcing
This flow velocity case is forced to follow the constant rotation rate given in the config options.
time step and run duration
This task uses the Runge-Kutta 4th-order (RK4) time integrator. The time step
for forward integration is determined by multiplying the resolution by a config
option, rk4_dt_per_km, so that coarser meshes have longer time steps. You can
alter this before setup (in a user config file) or before running the task (in
the config file in the work directory).
# config options for spherical convergence tests
[spherical_convergence_forward]
# time integrator: {'split_explicit', 'RK4'}
time_integrator = RK4
# RK4 time step per resolution (s/km), since dt is proportional to resolution
rk4_dt_per_km = 3.0
The convergence_eval_time, run_duration and output_interval are the
period for advection to make a full rotation around the globe, 12 days:
# config options for spherical convergence tests
[spherical_convergence_forward]
# Run duration in days
run_duration = ${sphere_transport:vel_pd}
# Output interval in days
output_interval = ${sphere_transport:vel_pd}
Here, ${sphere_transport:vel_pd} means that the same value is used as in the
option vel_pd in section [sphere_transport], see below.
config options
The rotation_2d config options include:
# options for all sphere transport test cases
[sphere_transport]
# temperature
temperature = 15.
# salinity
salinity = 35.
# time (hours) for bell to transit equator once
vel_pd = 288.0
# radius of cosine bells tracer distributions
cosine_bells_radius = 0.5
# background value of cosine bells tracer distribution
cosine_bells_background = 0.1
# amplitude of cosine bells tracer distribution
cosine_bells_amplitude = 0.9
# radius of slotted cylinders tracer distributions
slotted_cylinders_radius = 0.5
# background value of slotted cylinders tracer distribution
slotted_cylinders_background = 0.1
# amplitude of slotted cylinders tracer distribution
slotted_cylinders_amplitude = 1.0
# options for tracer visualization for the sphere transport test case
[sphere_transport_viz_tracer]
# colormap options
# colormap
colormap_name = viridis
# the type of norm used in the colormap
norm_type = linear
# colorbar limits
colorbar_limits = 0., 1.
# options for plotting tracer differences from sphere transport tests
[sphere_transport_viz_tracer_diff]
# colormap options
# colormap
colormap_name = cmo.balance
# the type of norm used in the colormap
norm_type = linear
# colorbar limits
colorbar_limits = -0.25, 0.25
# options for thickness visualization for the sphere transport test case
[sphere_transport_viz_h]
# colormap options
# colormap
colormap_name = viridis
# the type of norm used in the colormap
norm_type = linear
# colorbar limits
colorbar_limits = 99., 101.
# options for plotting tracer differences from sphere transport tests
[sphere_transport_viz_h_diff]
# colormap options
# colormap
colormap_name = cmo.balance
# the type of norm used in the colormap
norm_type = linear
# colorbar limits
colorbar_limits = -0.25, 0.25
# options for rotation 2-d test case
[rotation_2d]
# rotation vector in cartesian coordinates
rotation_vector = 0.2, 0.7, 1.0
# convergence threshold below which the test fails
convergence_thresh_tracer1 = 1.4
convergence_thresh_tracer2 = 1.8
convergence_thresh_tracer3 = 0.4
The options in section sphere_transport are used by all 4 test cases based
on Lauritzen et al. (2012) and control the initial condition. The options in
section rotation_2d control the convergence rate threshold.
The options in sections sphere_transport_viz* control properties of the viz
step of the test case.
The default options for the convergence analysis step can be changed here:
# config options for spherical convergence tests
[spherical_convergence]
# Evaluation time for convergence analysis (in days)
convergence_eval_time = ${sphere_transport:vel_pd}
# Type of error to compute
error_type = l2
cores
The target and minimum number of cores are determined by goal_cells_per_core
and max_cells_per_core from the ocean section of the config file,
respectively. This ensures that the number of cells per core is roughly
constant across the different resolutions in the convergence study.